Scaling limits of BS
OpenYear of origin: 2017
Posted online: 2018-06-28 19:02:43Z by Henrik Shahgholian76
Cite as: P-180628.1
General Description View the group
Let $\mu_0$ be a given (mass) distribution on $\mathbb Z^d$, i.e. a non-negative function supported on finitely many sites of $\mathbb Z^d$. Fix also a threshold $\kappa_0>0$. For each integer $k\geq 0$ we inductively construct a sequence of sets $V_k$, mass distributions $\mu_k$, and functions $u_k$ as follows. Start with $V_0 = \mathrm{supp} \mu_0$ and $u_0=0$. For an integer time $k\geq 0$ a particular site $x\in \mathbb Z^d$ is called unstable if either of the following holds:
(a) $x\in \partial V_k$ and $\mu_k (x) > \kappa_0$,
(b) $x\in \, \overset{\circ}{V_k}$ and $\mu_k (x) >0$.
Otherwise a site is called stable. We call the number $\kappa_0$ the (boundary) capacity of the model and refer to $V_k$ as the set of visited sites at time $k$.
Any unstable site can topple by distributing all its mass equally among its $2d$ lattice neighbours. More precisely, for each $k\geq 0$ we choose an unstable site $x\in V_k$ and define $V_{k+1} = V_k \cup \{y\in \mathbb Z^d: \ y\sim x \}$, \begin{equation} \tag{1} \mu_{k+1}(y) = \begin{cases} 0, &\text{if $y=x$}, \\ \mu_k(y) + \frac{1}{2d}\mu_k(x) ,&\text{if $ y\sim x $}, \\ \mu_k(y), &\text{otherwise}, \end{cases} \end{equation} and $u_{k+1} (y) = u_k(y) + \mu_k(y) \delta_0(y-x)$, $y\in \mathbb Z^d$, where $\delta_0$ is the Kronecker delta symbol at the origin, i.e. $\delta_0(x)$ equals 1 if $x=0$ and is zero otherwise for $x\in \mathbb Z^d$. We call $u_k$ the odometer function at time $k$. For the sake of convenience, we do allow the toppling to be applied to a stable site, as an identity operator, i.e. if at time $k$ a toppling is applied to a stable site $x$, then we set $V_{k+1}= V_k$, $u_{k+1}=u_k$ and $\mu_{k+1}=\mu_k$. We say that toppling $x$ is legal, if $x$ is unstable. If for some $k$ there are no unstable sites, the process is terminated. We call this model boundary sandpile (BS) and denote by $BS(\mu_0, \kappa_0)$, where $\mu_0$ is the initial distribution, and $\kappa_0$ is the boundary capacity of the model.
It is clear that the triple $(V_k, \mu_k, u_k)_{k=1}^\infty$ may depend on the choice of the unstable sites, i.e. the toppling sequence. Later on we will see that for a suitable class of toppling sequences stable configurations exist and are identical (see Propositions 2.1, 2.3 in [1]). Observe that from the definition of discrete Laplacian and (1) above, we easily see that for each $k\geq 0$ one has \begin{equation} \Delta u_k (x) = \mu_k(x) - \mu_0(x) , \qquad x\in \mathbb Z^d, \end{equation} i.e. the Laplacian of $u_k$ represents the net gain of mass for a site $x$ at time $k$.
Problem's Description
Problem 1.
Does the boundary sandpile process, for initial distributions concentrated at a point, have a scaling limit?
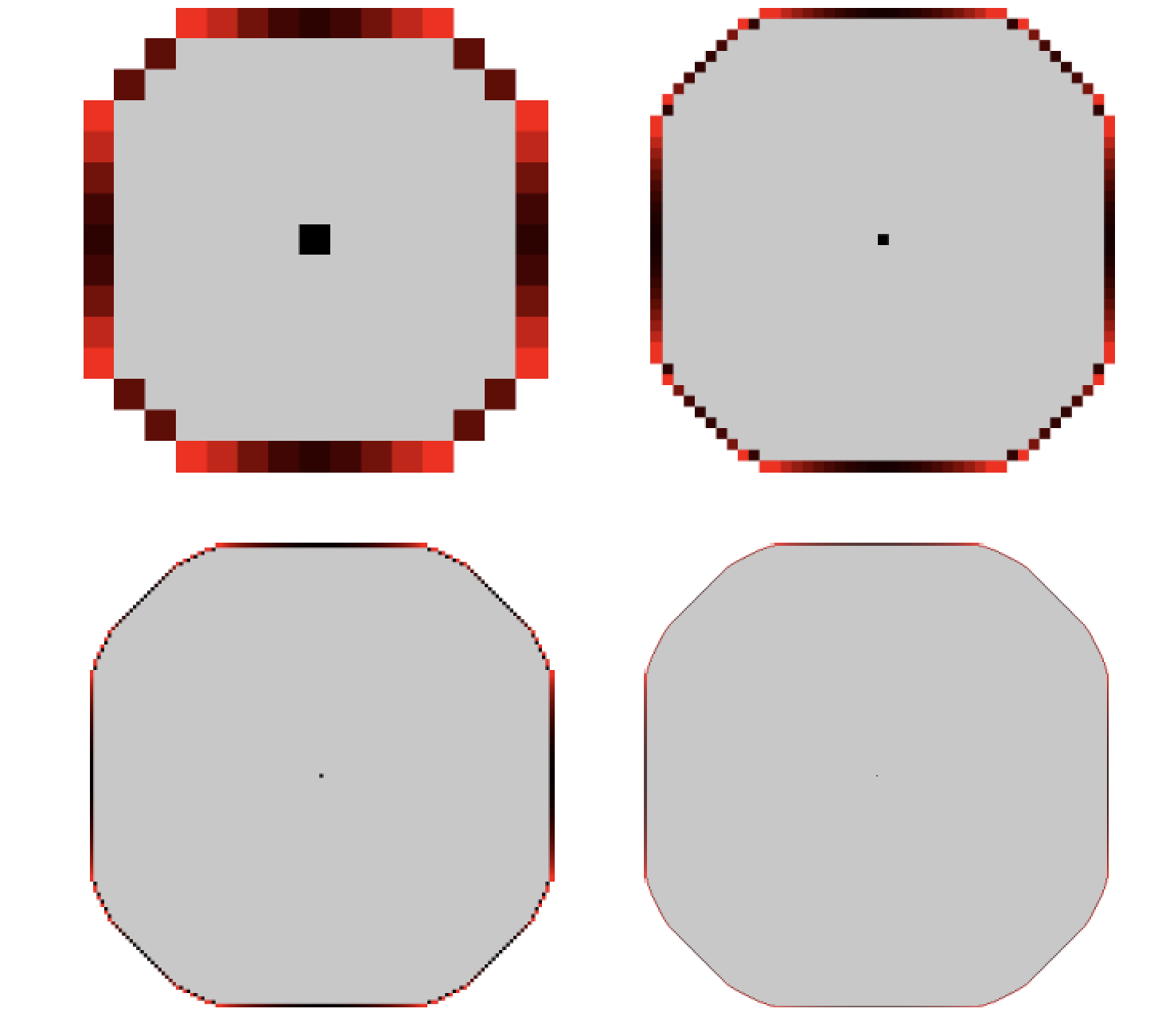
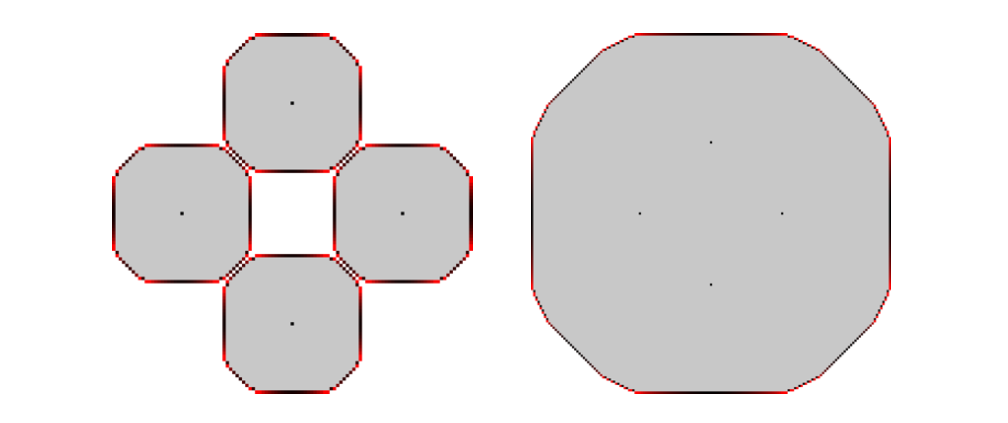
From [1; Theorem 5.3] we have that for any sequence of scalings $\mathfrak{h}:=\{h_k\}_{k=1}^\infty$, where $h_k\to 0$, one may extract a subsequence $\{h_{k_m} \}$ such that the corresponding sequence of scaled odometers will have a limit, call it $u_{\mathfrak{h}}$, satisfying the same properties as the function $u_0$ of [1; Theorem 5.3]. In particular, by [1; Theorem 5.3, (ii)] we have that any such $u_{\mathfrak{h}}$ is $C^\infty$ on its positivity set away from the neighbourhood of the origin, and is Lipschitz continuous up to the boundary of that set. However, we do not know if scaling limits generated by different scaling sequences must coincide.
No solutions added yet
Created at: 2018-06-28 19:02:43Z
No remarks yet